MJPEGで画像を取得する (c++/Linux)
本ページでは、i-PRO カメラとPCを MJPEG により接続してPC画面へ表示するプログラムを
c++ (Linux)
で作成する例を紹介します。とても短いプログラムで i-PRO カメラの映像を見ることができます。動作確認は i-PRO mini (WV-S7130)、モジュールカメラ(AIスターターキット)を使って行いましたが、ほとんどの i-PRO
カメラでそのまま利用できるはずです。ぜひお試しください。
動画を再生するには <video> タグをサポートしたブラウザが必要です。
[動画] MJPEG でカメラと接続して映像表示した様子
"i-PRO mini" 紹介:
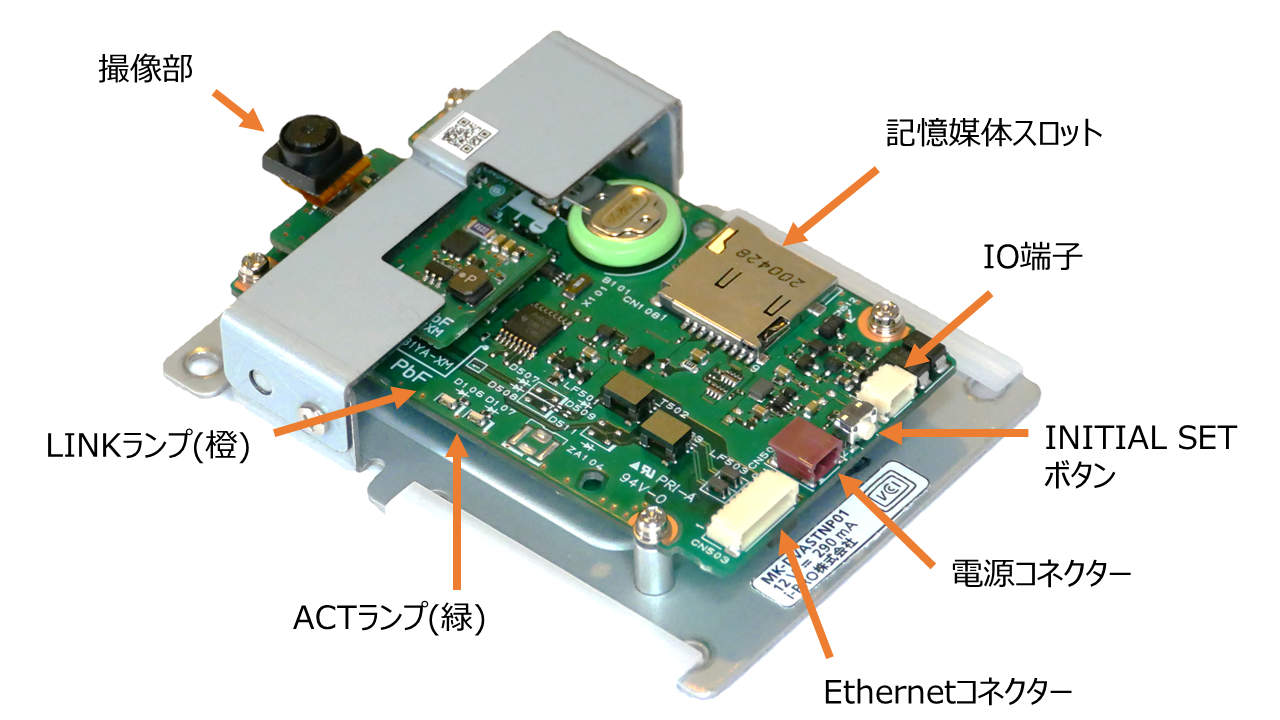
"モジュールカメラ" 紹介:
カメラ初期設定についてはカメラ毎の取扱説明書をご確認ください。
カメラのIPアドレスを確認・設定できる下記ツールを事前に入手しておくと便利です。
MJPEG で接続するための表記を以下に記載します。
「ネットワークカメラCGIコマンドインターフェース仕様書 統合版」[1] で下記に記載されている情報を元に加筆などしています。
「3.13 動画像取得(Motion JPEG 形式取得:リアルタイム) (nphMotionJpeg)」
http://<user-id>:<user-password>@<カメラのIPアドレス>/nphMotionJpeg?Resolution=<解像度>&Quality=<品質>&Framerate=<フレームレート>
(例)
http://admin:password@192.168.0.10/nphMotionJpeg?Resolution=1920x1080&Quality=Standard&Framerate=15
注意事項
実験してみたところ、ストリーム(1)~(4) を On にしているとMJPEGの配信性能が落ちる様子です。フレームレートを例えば 15
と設定してもコマ落ちが多く発生しているように見えました。
CGI のせっていでは "Framerate" の指定を必ず行った方が良さそうです。試しに Framerate 指定を行わなかったところ 0.2fps
程度の表示となりました。恐らくデフォルト値が 0.2fps ぐらいになっていると思われます。
[概要]
Linux の c++ と OpenCV を使って、PC と i-PRO カメラを MJPEG(Motion JPEG)
で接続して映像表示してみます。
今回の手法ではMPEGの取得をOpenCVに任せます。
[評価環境]
開発環境 :
GNU
9.4.0
ライブラリ :
OpenCV
4.6.0
OS :
ubuntu
20.04 LTS
[環境準備]
以下のコマンドを実施して環境を準備します。
sudo apt update -y && sudo apt upgrade -y
sudo apt install build-essential libopencv-dev cmake -y
sudo apt update -y && sudo apt upgrade -y
[プログラム]
サンプルプログラムのソースコードを以下に示します。
ソースを格納するフォルダを作成し、そこで作業を起こってください。
user_id, user_pw, host はあなたが使用するカメラの設定に従って変更してください。
プログラムを終了するときはキーボードから "q" キーを押す、またはコンソール上で [ctrl]+[c] してください。
[プログラムソース "opencv_mjpeg.cpp"]
/*
======================================================================================
[Abstract]
Try connecting to an i-PRO camera with MJPEG.
MJPEG で i-PRO カメラと接続してみる
[Details]
Let's try first.
まずはやってみる
[Library install]
sudo apt update -y && sudo apt upgrade -y
sudo apt install build-essential libopencv-dev cmake -y
sudo apt update -y && sudo apt upgrade -y
======================================================================================
*/
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/core/utility.hpp>
const std::string user_id = "user_id"; // Change to match your camera setting
const std::string user_pw = "user_pw"; // Change to match your camera setting
const std::string host = "192.168.0.10"; // Change to match your camera setting
const std::string winname = "VIDEO"; // Window title
const std::string framerate = "15"
const std::string url = "http://" + user_id + ":" + user_pw + "@" + host + "/cgi-bin/nphMotionJpeg?Framerate=" + framerate ;
int main(int argc, const char* argv[])
{
cv::VideoCapture cap(url);
cv::Mat frame;
char ret;
while (true) {
cap >> frame;
if (frame.empty()) {
break;
}
// Please modify the value to fit your PC screen size.
resize(frame, frame, cv::Size(), 0.5, 0.5); // Setting by magnification.
// Display video.
cv::imshow(winname, frame);
ret = (char)cv::waitKey(1); // necessary to display the video by cv::imshow().
// Press the "q" key to finish.
if (ret == 'q') {
break;
}
}
cap.release();
cv::destroyAllWindows();
return EXIT_SUCCESS;
}
このソースコードはRTSPのソースコードとほぼ同じとなります。
[ビルド]
ビルドにおいて環境依存を極力するなくするため、以下の手順でビルドします。
CMakeでMakefileを生成する
生成したMakefileを使ってビルドする
ソースコード(opencv_mjpeg.cpp)と同じディレクトリに以下のように中身が書かれたCMakeLists.txtを配置してください。
CMake の知識がある方は、内容をカスタマイズしてお使いください。
["CMakeLists.txt"]
# 変数SOURCE_CORDEを宣言し、ソースコードのファイル名の拡張子無くした値を入れる。
# cmake -D SOURCE_CODE=(ソース名)で上書き可
set(SOURCE_CODE opencv_mjpeg CACHE NAME "Target object name")
# CMakeの最低バージョンを記述
cmake_minimum_required(VERSION 2.8)
# ソリューション名を指定
project( ${SOURCE_CODE} )
# OpenCVのパッケージを探す
find_package( OpenCV REQUIRED )
#ヘッダファイルのパスを指定
include_directories( ${OpenCV_INCLUDE_DIRS} )
# 実行ファイル名とソース指定(ここではソースと同じ名前の実行ファイルを作ります)
add_executable( ${SOURCE_CODE} ${SOURCE_CODE}.cpp )
#リンク先のライブラリを指定
target_link_libraries( ${SOURCE_CODE} ${OpenCV_LIBS})
ビルド環境を作成してアプリケーションを構築するため、以下のコマンドを実施します。
mkdir build && cd build
cmake ..
make
これにより、buildディレクトリに[opencv_jpeg]という実行ファイルができましたので、以下のようにコマンドを実施すればアプリケーションが実施されます
./opencv_mjpeg
ソースコードの変更をする場合は、すでにビルド環境ができていますので、buildディレクトリで以下のようにすれば更新が可能です。
ライブラリを追加する場合は CMakeLists.txtの追記を行い、build ディレクトリを削除してcmakeをやり直してください。
make clean
make
[概要]
Linux の c++ と OpenCV を使って、PC と i-PRO カメラを MJPEG(Motion JPEG)
で接続して映像表示してみます。
MJPEGのヘッダーの情報が欲しい時はこちらのソースコードを参考にしてみてください。
[評価環境]
開発環境 :
GNU
9.4.0
ライブラリ :
OpenCV
4.6.0
OS :
ubuntu
20.04 LTS
※注意:このソースでは"gcc extensions" を利用しています。標準仕様ではないので gcc/g++ 以外ではエラーになります。
[環境準備]
以下のコマンドを実施して環境を準備します。
sudo apt update -y && sudo apt upgrade -y
sudo apt install build-essential libopencv-dev cmake -y
sudo apt install libcurl4-openssl-dev -y
sudo apt update -y && sudo apt upgrade -y
[プログラム]
サンプルプログラムのソースコードを以下に示します。
ソースを格納するフォルダを作成し、そこで作業を起こってください。
user_id, user_pw, host はあなたが使用するカメラの設定に従って変更してください。
プログラムを終了するときはキーボードから "q" キーを押す、またはコンソール上で [ctrl]+[c] してください。
[プログラムソース "opencv_mjpeg_curl.cpp"]
/*
======================================================================================
[Abstract]
Try connecting to an i-PRO camera with MJPEG by curl.
RTSP で i-PRO カメラと接続してみる
[Details]
Let's try first.
まずはやってみる
[Library install]
sudo apt update -y && sudo apt upgrade -y
sudo apt install build-essential libopencv-dev cmake -y
sudo apt install libcurl4-openssl-dev -y
sudo apt update -y && sudo apt upgrade -y
======================================================================================
*/
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>
#include <opencv2/core/utility.hpp>
#include <curl/curl.h>
const std::string user_id = "user-id"; // Change to match your camera setting
const std::string user_pw = "password"; // Change to match your camera setting
const std::string host = "192.168.0.10"; // Change to match your camera setting
const std::string winname = "VIDEO"; // Window title
const std::string framerate = "15"; // Frame rate (indispensable param)
const std::string cameraURL = "http://" + host + "/cgi-bin/nphMotionJpeg?Framerate=" + framerate;
// data receive callback function
size_t onReceive(void *ptr, size_t size, size_t nmemb, void *userdata)
{
//important static flag
static bool isSOI = false;
//receivebuffer handover
std::vector<char>* receiveBuffer = (std::vector<char>*)userdata;
const size_t segsize = size * nmemb;
//Find SOI/EOI and get position and raise a flag
int PosS=0; //start positon
int PosE=0; // end positon
int status=0; //0:Non,1:EOI,2:SOI,3:EOI->SOI
bool isJPEG=false;
//Finding SOI and EOI
for(int i=0;i<segsize-1;i++){
//find EOI
if(*((char*)ptr+i)==(char)0xFF && *((char*)ptr+i+1)==(char)0xD9 && isSOI==true){
isSOI=false;
PosE=i+1;//eoi position
status=1;
}
//find SOI
if(*((char*)ptr+i)==(char)0xFF && *((char*)ptr+i+1)==(char)0xD8 && isSOI==false){
isSOI=true;
PosS=i; //soi positon
if(status==1){ //EOI -> neer -> SOI
status=3;
}else{
status=2;
}
break; //start JPEG Image
}
}
//Fill jpeg data into receiveBuffer
if(isSOI==true && status==0){
receiveBuffer->insert(receiveBuffer->end(), (char*)ptr, (char*)ptr+segsize);
}else if(status==2){
receiveBuffer->insert(receiveBuffer->end(), (char*)ptr+PosS, (char*)ptr+segsize);
}else if(status==1 || status==3){
receiveBuffer->insert(receiveBuffer->end(), (char*)ptr, (char*)ptr+PosE);
isJPEG=true; //complete JPEG
}
//display JPEG
if(isJPEG==true){
try{
// JPEG decore
cv::Mat frame = cv::imdecode(*receiveBuffer, cv::IMREAD_UNCHANGED);
//clear recv_buffer
receiveBuffer->clear();
// Please modify the value to fit your PC screen size.
resize(frame, frame, cv::Size(), 0.5, 0.5);
cv::imshow(winname, frame); //Display video.
if((char)cv::waitKey(1) >= 0) { // wait for any key
return 0;
}
}catch(...){
//clear recv_buffer
receiveBuffer->clear();
}
}
//Fill jpeg data into receiveBuffer
if(status==3){ //EOI -> neer -> SOI : recv_buf need to add data
receiveBuffer->insert(receiveBuffer->end(), (char*)ptr+PosS, (char*)ptr+segsize);
}
return segsize;
}
int main(int argc, char* argv[])
{
std::vector<char> receiveBuffer;
CURL* curl = NULL;
CURLcode res;
//init curl processing
curl = curl_easy_init();
if (!curl) {
printf("curl_easy_init() failed...\n");
return 0;
}
//for digest
curl_easy_setopt(curl, CURLOPT_HTTPAUTH, CURLAUTH_DIGEST);
std::string user_id_pw =user_id + ":" + user_pw;
curl_easy_setopt(curl, CURLOPT_USERPWD, user_id_pw.c_str());
//curl option
curl_easy_setopt(curl, CURLOPT_URL, cameraURL.c_str());
curl_easy_setopt(curl, CURLOPT_WRITEDATA, &receiveBuffer);
curl_easy_setopt(curl, CURLOPT_WRITEFUNCTION, onReceive);
//In the mjpeg case, curl_easy_perform continues
res = curl_easy_perform(curl);
//curl processing finished
curl_easy_cleanup(curl);
receiveBuffer.clear();
cv::destroyAllWindows();
return 0;
}
MJPEGはストリームになるため、一度curl_easy_performが実行されると、ネットワーク切断が発生するまでcurl_easy_performが実行され続けます。
[ビルド]
ビルドにおいて環境依存を極力するなくするため、以下の手順でビルドします。
CMakeでMakefileを生成する
生成したMakefileを使ってビルドする
ソースコード(opencv_mjpeg_curl.cpp)と同じディレクトリに以下のように中身が書かれたCMakeLists.txtを配置してください。
CMake の知識がある方は、内容をカスタマイズしてお使いください。
["CMakeLists.txt"]
# 変数SOURCE_CORDEを宣言し、ソースコードのファイル名の拡張子無くした値を入れる。
# cmake -D SOURCE_CODE=(ソース名)で上書き可
set(SOURCE_CODE opencv_mjpeg_crel CACHE NAME "Target object name")
# CMakeの最低バージョンを記述
cmake_minimum_required(VERSION 2.8)
# ソリューション名を指定
project( ${SOURCE_CODE} )
# OpenCVのパッケージを探す
find_package( OpenCV REQUIRED )
#ヘッダファイルのパスを指定
include_directories( ${OpenCV_INCLUDE_DIRS} )
# CURLのパッケージを探す
find_package( CURL REQUIRED )
#ヘッダファイルのパスを指定
include_directories( ${CURL_INCLUDE_DIR} )
# 実行ファイル名とソース指定(ここではソースと同じ名前の実行ファイルを作ります)
add_executable( ${SOURCE_CODE} ${SOURCE_CODE}.cpp )
#リンク先のライブラリを指定
target_link_libraries( ${SOURCE_CODE} ${OpenCV_LIBS} ${CURL_LIBRARIES})
ビルド環境を作成してアプリケーションを構築するため、以下のコマンドを実施します。
mkdir build && cd build
cmake ..
make
これにより、buildディレクトリに[opencv_jpeg]という実行ファイルができましたので、以下のようにコマンドを実施すればアプリケーションが実施されます
./opencv_mjpeg_curl
ソースコードの変更をする場合は、すでにビルド環境ができていますので、buildディレクトリで以下のようにすれば更新が可能です。
ライブラリを追加する場合は CMakeLists.txtの追記を行い、build ディレクトリを削除してcmakeをやり直してください。
make clean
make
本ページの情報は、特記無い限り下記 MIT ライセンスで提供されます。
The MIT License (MIT)
変更履歴
2025/11/17
-
「[1] ネットワークカメラCGIコマンドインターフェース仕様書」 リンク先を更新,
木下英俊
2023/3/22
-
新規作成,
木下英俊